Disusun Oleh :
-
Rangga
Dwi Fachreza (58414905)
-
Yogi
Husyen Prasetya (5C414421)
-
Firza (54414301)
-
Bayu
Hernawan W. (52414063)
-
Muhammad
Rizki (57414000)
Kelas : 3IA09
Dosen : Karmilasari
PENDAHULUAN
1.
Pengertian Visible Surface Determination(VSD)
Visible Surface
determination (VSD) atau disebut juga dengan Hidden Surface Removal
(HSR)
merupakan suatu cara untuk menentukan garis atau permukaan yang terlihat pada suatu
objeck 3D dan spesifikasi pandangan (kamera), sering juga di definisikan
sebagai suatu algoritma yang digunakan untuk menghilangkan penampilan bagian
yang tertutup oleh objek yang didepannya. Pada materi visible surface
determination terdapat didalamnya materi algoritma z-buffer dan algoritma
scanline. Algoritma Z-Buffer adalah salah satu dari algoritma Hidden surface removal yang
mempergunakan image space sebagai dasar proses penghitungan tampak atau tidaknya
permukaan suatu objek. Algoritma ini melakukan scaning satu kali untuk suatu
permukaan objek sampai proses berakhir. Sedangkan Algoritma Scan Line adalah salah satu dari
algoritma Hidden Surface Removal yang digunakan untuk
memecahkan masalah penggunaan memori yang besar dengan satu baris scan untuk
memproses semua permukaan objek, biasanya Scan Line akan
men-sweeping layar dari atas ke
bawah. Pada hakekatnya, grafika komputer atau yang sering disebut grafika computer
adalah bagian dari ilmu komputer yang berkaitan dengan pembuatan dan manipulasi
gambar (visual) secara digital. Bentuk sederhana dari grafika komputer adalah
grafika komputer 2D yang kemudian berkembang menjadi grafika komputer 3D,
pemrosesan citra (image processing), dan
pengenalan pola (pattern recognition).
Grafika computer sering dikenal juga dengan istilah visualisasi data .
Sedangakan dalam pokok bahasan
Visible Surface
Determination ini mempelajari tentang materi Algoritma Z Buffer dan Algoritma Scan-Line. Berdasarkan
wawancara dengan beberapa mahasiswa yang pernah mengambil mata kuliah grafika
komputer sebagian besar menyebutkan bahwa materi Visible Surface Determination ini cukup sulit untuk dipahami.
Hal ini disebabkan karena materi ini membahas
tentang titik –titik koordinat suatu bangun yang sukar untuk dibayangkan. Selain itu, sistem pembelajaran yang
diterapkan juga bersifat klasikal menyebabkan pemahaman mahasiswa terkadang masih kurang. Selain materinya
sulit untuk dimengerti, didalam
materi ini juga terdapat algoritma yang membutuhkan perhitungan untuk menghitung titik-titik
koordinat objek algoritma z buffer dan
algoritma scan line sehingga
dosen dituntut untuk menjelaskan materi tersebut secara detail agar penyampaian materi tersebut dapat
diterima oleh mahasiswa sehingga dibutuhkan sebuah media yang disajikan secara visual.
2. Konsep
dasar Visible-Surface Determination
(VSD)
Visible-Surface
Determination atau yang sering disebut dengan Hidden Surface Removal adalah suatu
algoritma yang digunakan untuk menghilangkan
penampilan bagian yang tertutup oleh objek yang didepannya. Apabila ada dua bidang yang berpotongan, apabila ditampilkan biasa tanpa menggunakan
algoritma Visible Surface Determination
maka bagian yang berpotongan itu akan tidak kelihatan, oleh karena bidang yang satu ditutupi oleh bagian yang lain
tanpa memotong. Oleh karena itu
untuk menampilkan bidang perpotongan, diperlukan
Algoritma Hidden Surface Removal
PEMBAHASAN
1. Ketelitian objek (object-precission)
Object
Precission yaitu menentukan bagian mana yang terlihat dengan membandingkan
objek dan bagian-bagiannya dalam layar. Objek precission merupakan salah satu
teknik dari Visible Surface determination(VSD).
Contoh
dari Obeject Precission : pada polygon clipping, BSP trees,dll.
Berikut
akan dijelaskan beberapa contoh dari Object Precission.
1.
Polygon Clipping
Polygon merupakan bidang yang tersusun dari verteks
(titik sudut) dan edge (garis penghubung setiap verteks). Untuk dapat melakukan
proses clipping pada polygon diperlukan algoritma yang lebih kompleks dari
kedua teknik clipping yang telah di bahas sebelumnya. Salah satunya adalah
algortima Sutherland-Hodgman. Ide dasarnya adalah memperhatikan edge pada setiap
arah pandang, lalu clipping polygon dengan persamaan edge kemudian lakukan
clipping tersebut pada semua edge hingga polygon terpotong sepenuhnya. Ada
beberapa ketentuan dari algoritma Sutherland-Hodgman, diantaranya adalah
1.
Polygon dapat dipotong dengan setiap edge dari
window sekali pada suatu waktu
2.
Vertex yang telah dipotong akan disimpan untuk
kemudian digunakan untuk memotong edge yang masih ada
3.
Perhatikan bahwa jumlah vertex biasanya berubah-ubah
dan sering bertambah
Gambar Contoh Polygon Clipping
2. Metode Pohon BSP (Binary Space
Partitioning)
Binary Space Partitioning (BSP) adalah salah satu metode yang digunakan untuk membagi suatu area
yang terdiri dari beberapa poligon terpisah untuk mendapatkan bentuk yang
diinginkan. Cara pembagian yang spesifik berbeda-beda, tergantung tujuan yang
ingin dicapai. Tujuan yang banyak diinginkan adalah membagi area menjadi
beberapa bagian yang belum tentu sama besar, namun hanya memiliki satu poligon
di setiap bagiannya. BSP dilakukan dengan cara rekursif, dan melakukan pembagian
area menjadi dua bagian dalam setiap kali pembagiannya. Sesuai namanya, Binary Space Partitioning selalu melakukan pembagian terhadap area suatu
objek menjadi dua bagian. Aplikasi BSP banyak ditemukan di bidang computer graphics, baik two dimensions (2D)
maupun three
dimensions (3D). Tujuannya adalah untuk membagi suatu objek menjadi
objek-objek yang lebih kecil sehingga memudahkan pemrosesan setiap objek kecil
tersebut, untuk melakukan modifikasi terhadap objek besar. Contoh modifikasi yang
dapat dilakukan misalnya pewarnaan sebagian objek, penghapusan salah satu objek
kecil, pengubahan ukuran salah satu objek kecil, serta penyisipan objek baru di
antara beberapa objek. Dalam modifikasi berupa penghapusan, pengubahan ukuran,
maupun penambahan objek baru akan mempengaruhi keberadaan objek-objek kecil lainnya.
Pendekatan BSP ini menangani perubahan yang dikenakan terhadap objek kecil dengan
tetap menjaga keutuhan objek besar tersebut.
Gambar Contoh
hasil pembagian suatu objek
menjadi objek-objek yang lebih kecil
Pembagian suatu
objek utuh dilakukan dengan membagi objek utuh tersebut menjadi dua bagian yang
tidak harus sama besar. Konsep utamanya adalah melakukan pembagian objek
menjadi tepat dua bagian, dan pembagian tidak bersinggungan dengan poligon yang
terdapat di dalam objek. Bila pembagian yang dilakukan ternyata menyinggung atau
menabrak poligon di dalam objek, maka pembagian harus diulang dengan cara lain.
Selanjutnya, secara rekursif pembagian dilakukan terhadap objek-objek kecil
yang di dalamnya masih terdapat lebih dari satu poligon. Pembagian dihentikan
ketika setiap bagian hanya berisi satu poligon.
2.1. Binary Space
Partitioning Tree
Seperti yang telah
dipaparkan di atas, Binary Space
Partitioning selalu melakukan pembagian terhadap suatu objek menjadi dua bagian objek yang lebih kecil. Di sini, konsep binary tree (pohon biner) dapat diterapkan. Binary Space Partitioning Tree (BSP Tree) adalah suatu struktur yang merepresentasikan pembagian suatu
ruang atau area secara hierarki
dan rekursif menjadi ruang-ruang yang
lebih kecil. Pembangunan BSP Tree mengikuti konsep BSP. Misalnya terdapat sejumlah poligon
di dalam suatu area.
Langkah-langkah pembangunan suatu BSP
Tree adalah sebagai berikut.
a.
Buat satu simpul sebagai akar pohon.
Akar pohon ini merepresentasikan suatu objek besar
yang utuh yang akan dibagi ke dalam objek-objek kecil.
b.
Pilih area yang akan dibagi.
Dalam memilih area yang akan dibagi, misalnya
pembagian area dua dimensi direpresentasikan
dengan garis, pastikan garis pembagi tidak menyinggung
poligon yang ada di dalam objek.
c.
Lakukan pembagian terhadap area yang telah dipilih.
Dengan melakukan pembagian, maka akar pohon
yang dibuat di awal melahirkan dua simpul baru, yang masing-masing merupakan representasi
area baru yang tercipta dari hasil pembagian.
d.
Lakukan secara rekursif langkah (b) dan (c).
Rekursif dilakukan terhadap simpul-simpul yang
baru terbentuk jika di dalam area hasil pembagian tersebut masih terdapat lebih
dari satu poligon.
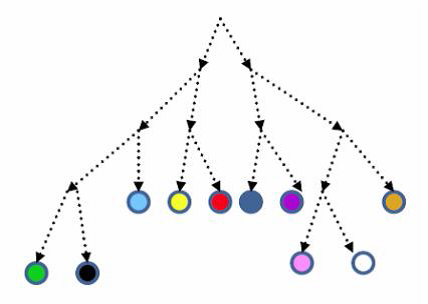
Gambar
Hasil pembangunan BSP tree dari objek
3. Algoritma Warnock
Algoritma Warnock adalah hidden surface algorithm
yang ditemukan oleh John Warnock yang biasanya digunakan dalam bidang grafis
komputer. Ini memecahkan masalah membuat gambar yang rumit dengan pembagian
ulang rekursif dari sebuah adegan sampai area diperoleh untuk dihitung. Dengan
kata lain, jika adegan cukup sederhana untuk dihitung secara efisien maka itu
akan diberikan; Jika tidak, itu dibagi menjadi bagian-bagian yang lebih kecil
yang juga diuji untuk kesederhanaan.
Ini adalah algoritma membagi dan menaklukkan dengan
run-time O (np), di mana n adalah jumlah poligon dan p
adalah jumlah piksel di area pandang. Masukannya adalah daftar poligon dan area
pandang. Kasus terbaiknya adalah jika daftar poligon sederhana, maka gambarlah
poligon di area pandang. Sederhana didefinisikan sebagai satu poligon (poligon
atau bagiannya ditarik di bagian yang sesuai dari area pandang) atau area
pandang yang berukuran satu pkiksel (kemudian pixel tersebut mendapat warna
poligon yang paling dekat dengan pengamat). Langkah kontinyu adalah membagi
area pandang menjadi 4 kuadran berukuran sama dan secara rekursif memanggil
algoritme untuk masing-masing kuadran, dengan daftar poligon yang dimodifikasi
sehingga hanya mengandung poligon yang terlihat di kuadran tersebut.